Gazebo is a high-quality robot simulator that is well integrated into ROS. We will use it for your project as well as for this assignment. A significant amount of the development you will be doing in this class will happen first under simulation, and then will be tested on the robot. The goal of this assignment is to get familiar with the Gazebo simulator, simulating both a physical robot and input from its sensors.
1: Simulate a Husky Model in an empty world in a Gazebo environment
Your first goal is to get the Gazebo simulator running with ROS. You will:
| |
|
→ Gazebo home page → Gazebo tutorials (use 'Guided') → ROS Gazebo Page → Simulating the Husky in Gazebo → Driving a Husky |
|
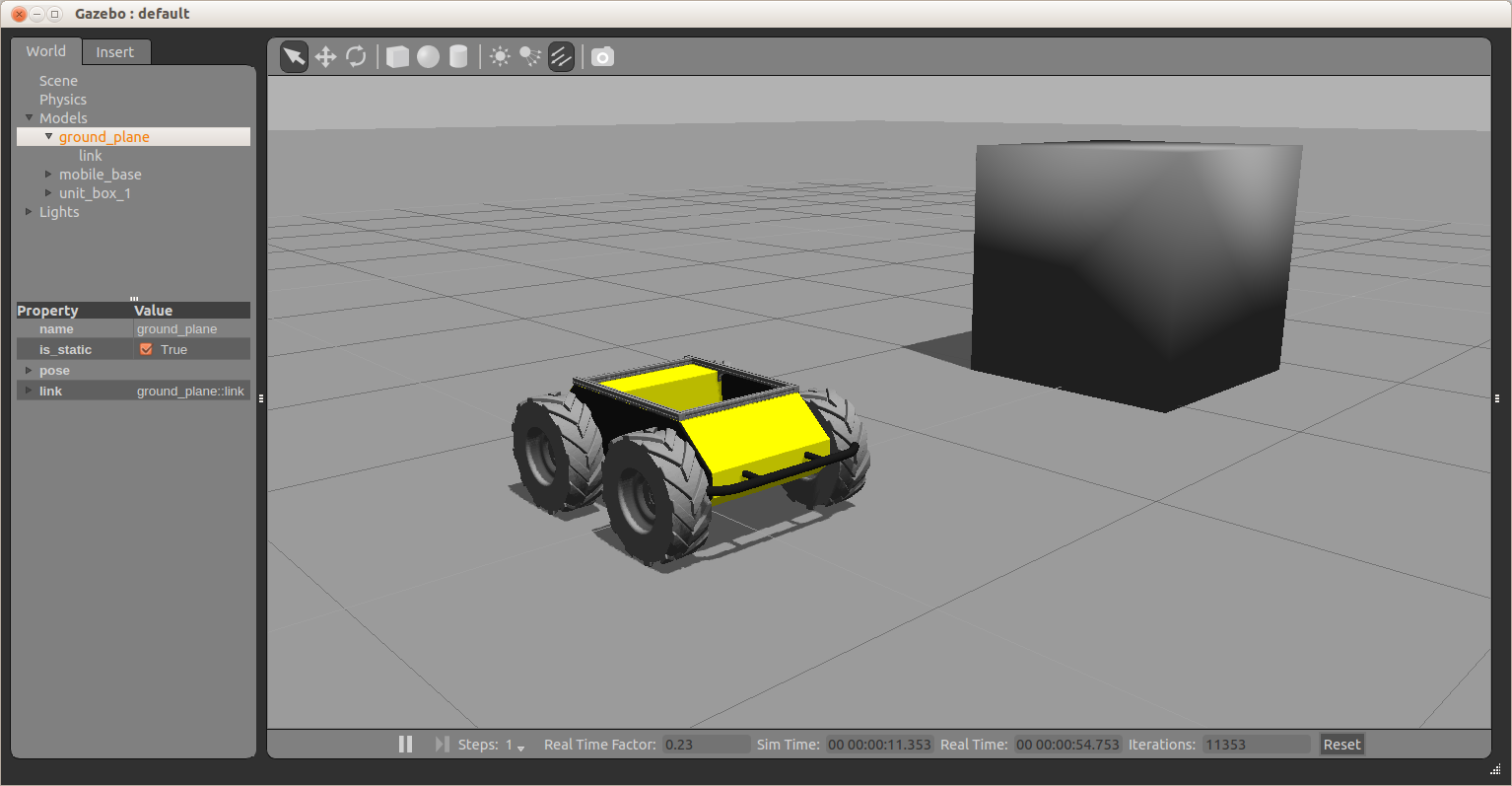
2: Add an obstacle to the Husky's world
You initially loaded an empty world for the Husky to drive around in; now add one or more objects to that world, which the husky must avoid.
You will:
| |
|
→ Reference picture of Husky with obstacles |
|
{kind=link}
3: Navigate Around the Simulation
Similar to step 1.3. Navigate around the new enriched world.
You will:
| |
|
→ Controlliong a turtlebot (which you're familiar with) in simulation → http://wiki.ros.org/husky_gazebo/Tutorials/Simulating%20Husky |
|
Turn in:
The following things will be your deliverables:- A writeup of the process. This should be a PDF file, 200-400 words, containing:
- The names of anyone with whom you discussed the homework (in general terms), and a little about how/with what.
- Approximately how much time you spent on each step of the process.
- The thing(s) you found hardest and any errors/problems you ran into.
- Screenshots (PNG, GIF, or JPG)
- 1: Two visualization(s) of the Husky navigating in an empty world
- 2: The Husky in a world with the obstacle
- Your scripts and code files if any (e.g., if you are controlling the Husky programmatically).
- The output of your rosbag info command, as a text file.
Upload Parts 2-3 in a single zip file named yourlastname-asst2.zip.
Remember, file types matter!